SO-101 조립 가이드
이 문서는 HuggingFace LeRobot So-Arm 101 공식 가이드를 기반으로, RoboSEasy 스타일로 재구성한 한국어 조립 안내서입니다.
1. 개요
SO-101은 6축 오픈소스 로봇 팔로, 3D 프린팅 부품과 STS3215 서보 모터를 사용하여 직접 조립할 수 있습니다.
2. 준비 단계
2.1 부품 소싱 및 3D 프린팅
- SO-ARM100/101 README에서 부품 목록(BOM)과 3D 프린팅 파일을 확인하세요.
- 로보시지는 로보시지만의 3D 프린팅을 제공합니다. 더욱 넓은 확장성과 불편한 부분을 개선하였습니다.
- 3D 파츠 구매하기
- So-ARM 풀패키지 구매하기
2.2 LeRobot 설치
- 설치 가이드를 참고하여 LeRobot을 설치하세요.
- Feetech SDK도 추가로 설치해야 합니다.
가상환경 활성화
cd lerobot
# 가상환경 활성화
source .venv/bin/activateFeetech SDK 설치
pip install -e ".[feetech]"3. 모터 설정
💡TIP : 반드시 조립 전, 모터 설정을 먼저해주세요. 조립 후 모터 설정을 하게 되면 모터 케이블을 다시 빼고 하나씩 모터 설정을 해야합니다.
3.1 USB 포트 찾기
Leader 보드와 Follower 보드를 자신의 PC와 USB 케이블로 연결한 후, 아래 명령어로 포트를 확인하세요.
ls /dev/ttyACM*lerobot-find-portLeader 보드와 연결된 USB 케이블을 PC에서 뽑고 Enter를 누릅니다. 그러면 아래와 같은 결과를 확인할 수 있습니다.
The port of this MotorsBus is '/dev/ttyACM0'
Reconnect the USB cable해당 보드의 포트는 ‘/dev/ttyACM0’입니다.
이제 Follower 보드와 PC와 연결된 USB 케이블만 남겨두고 같은 명령어를 실행합니다.
lerobot-find-portFollower 보드와 연결된 USB 케이블을 PC에서 뽑고 Enter를 누릅니다. 그러면 아래와 같은 결과를 확인할 수 있습니다.
The port of this MotorsBus is '/dev/ttyACM1'
Reconnect the USB cable해당 보드의 포트는 ‘/dev/ttyACM1’입니다.
각 포트가 어떤 팔(Leader/Follower)에 해당하는지 구분하세요.
💡TIP : Ubuntu에서는 기본적으로 포트 사용 권한이 제한되어 있습니다. 따라서 사용자를 dialout 그룹에 추가 해 두면, 매번 포트 권한을 직접 설정하지 않아도 되어 훨씬 편리하게 사용할 수 있습니다.
dialout 그룹 권한 부여
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1sudo usermod -a -G dialout $USER3.2 모터 ID 및 Baudrate 설정
각 모터는 고유 ID가 필요하며, 통신을 위해 동일한 Baudrate로 설정해야 합니다.
아래 명령어를 실행하고 터미널에서 보이는 가이드에 따라서 모터와 순서를 따르세요.
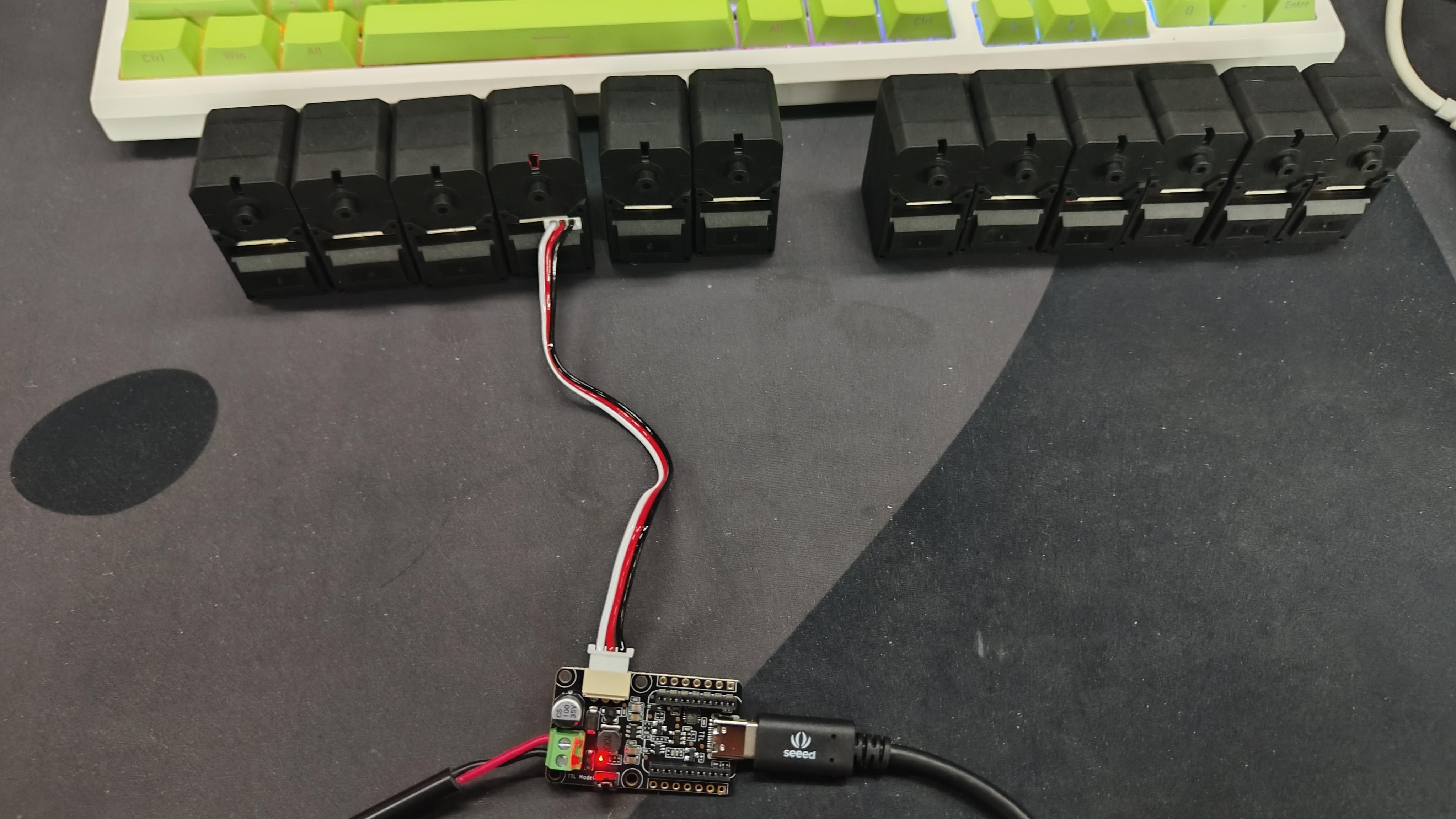
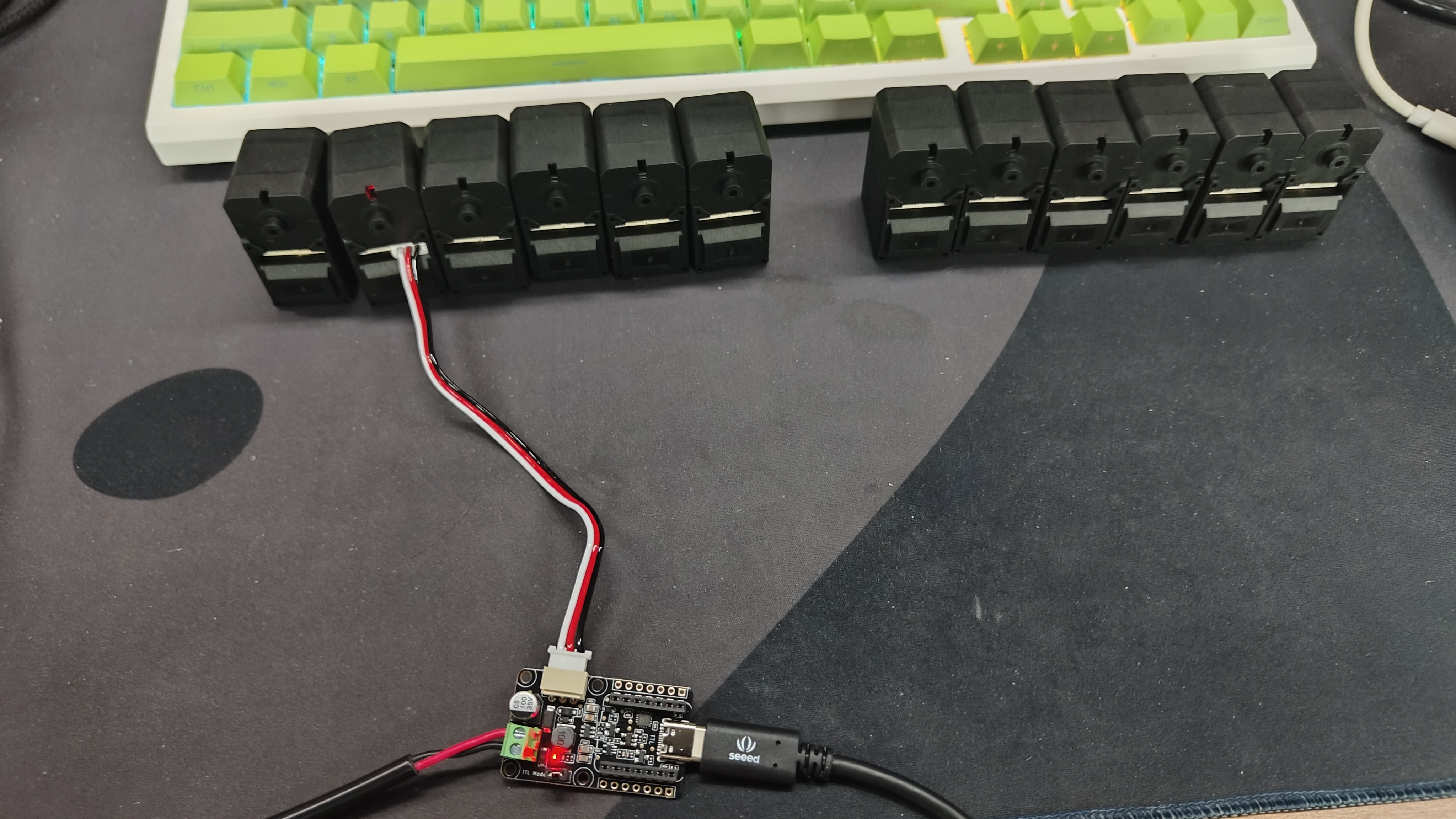
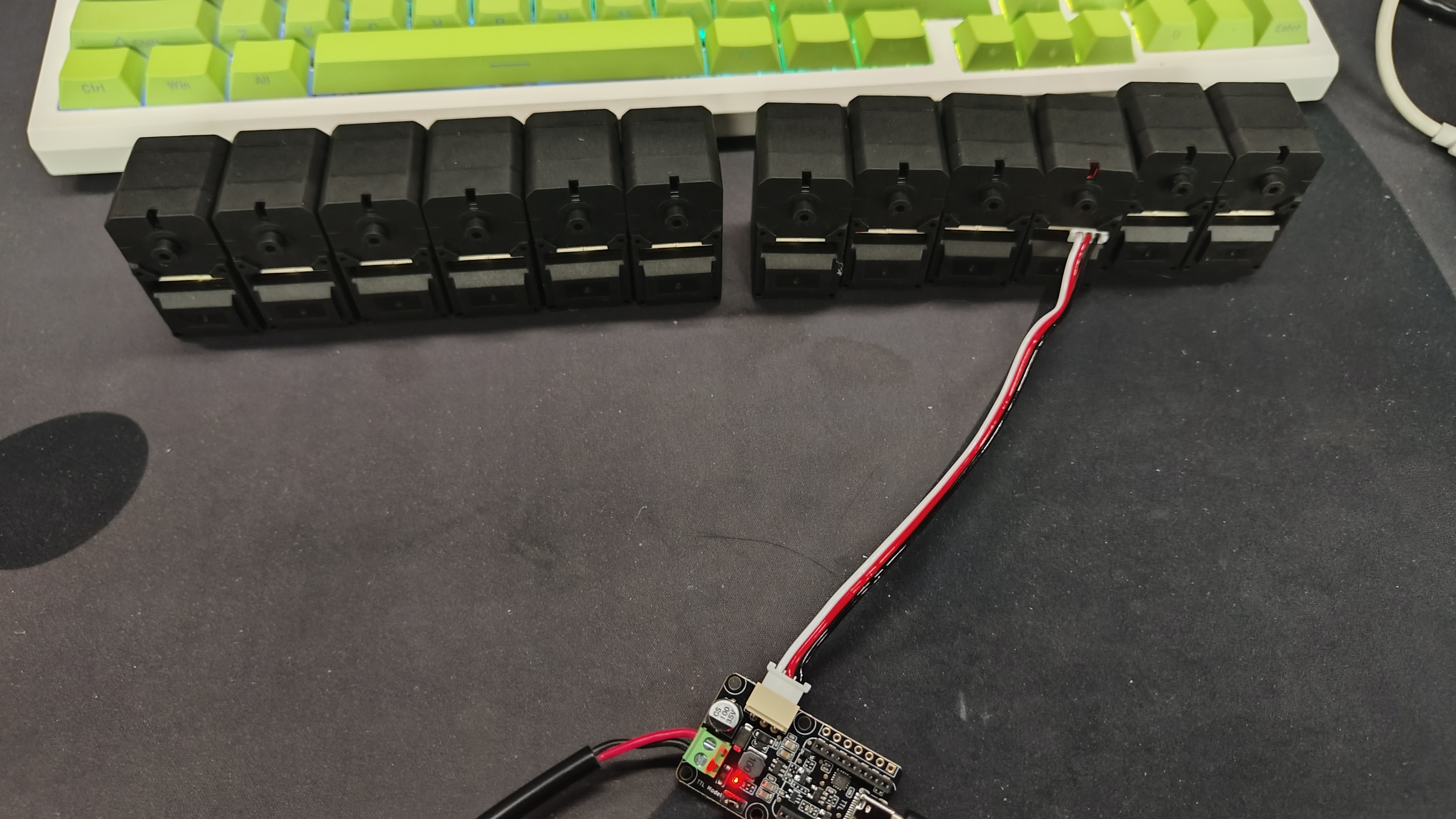
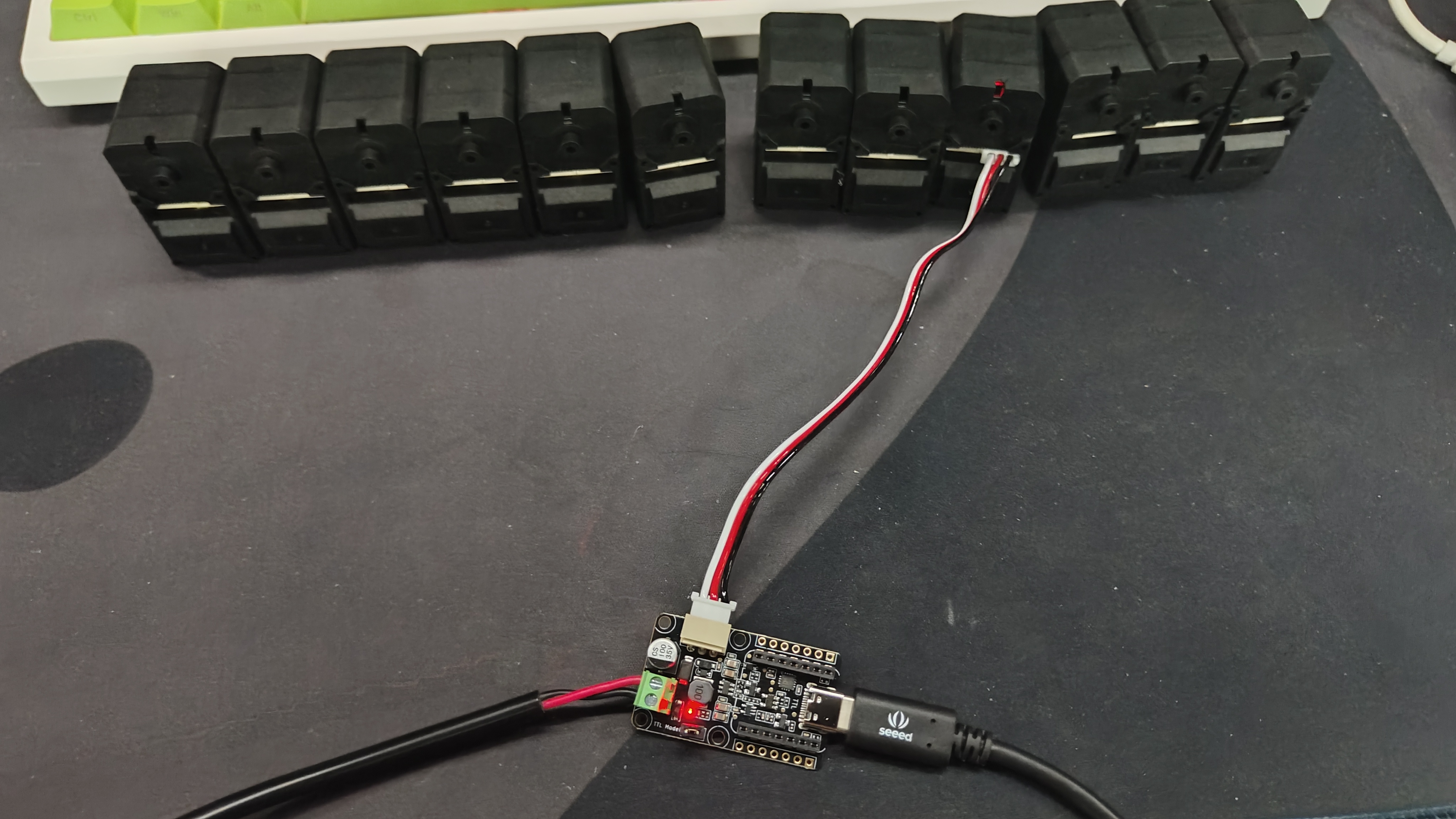
💡TIP : 미리 모터를 순서대로 배열하고 아래 명령어를 실행합니다. 아래 첨부한 이미지를 참고하여 순서를 잘지켜 진행하세요.
| Leader Arm Joint 6 | Leader Arm Joint 5 | Leader Arm Joint 4 |
|---|---|---|
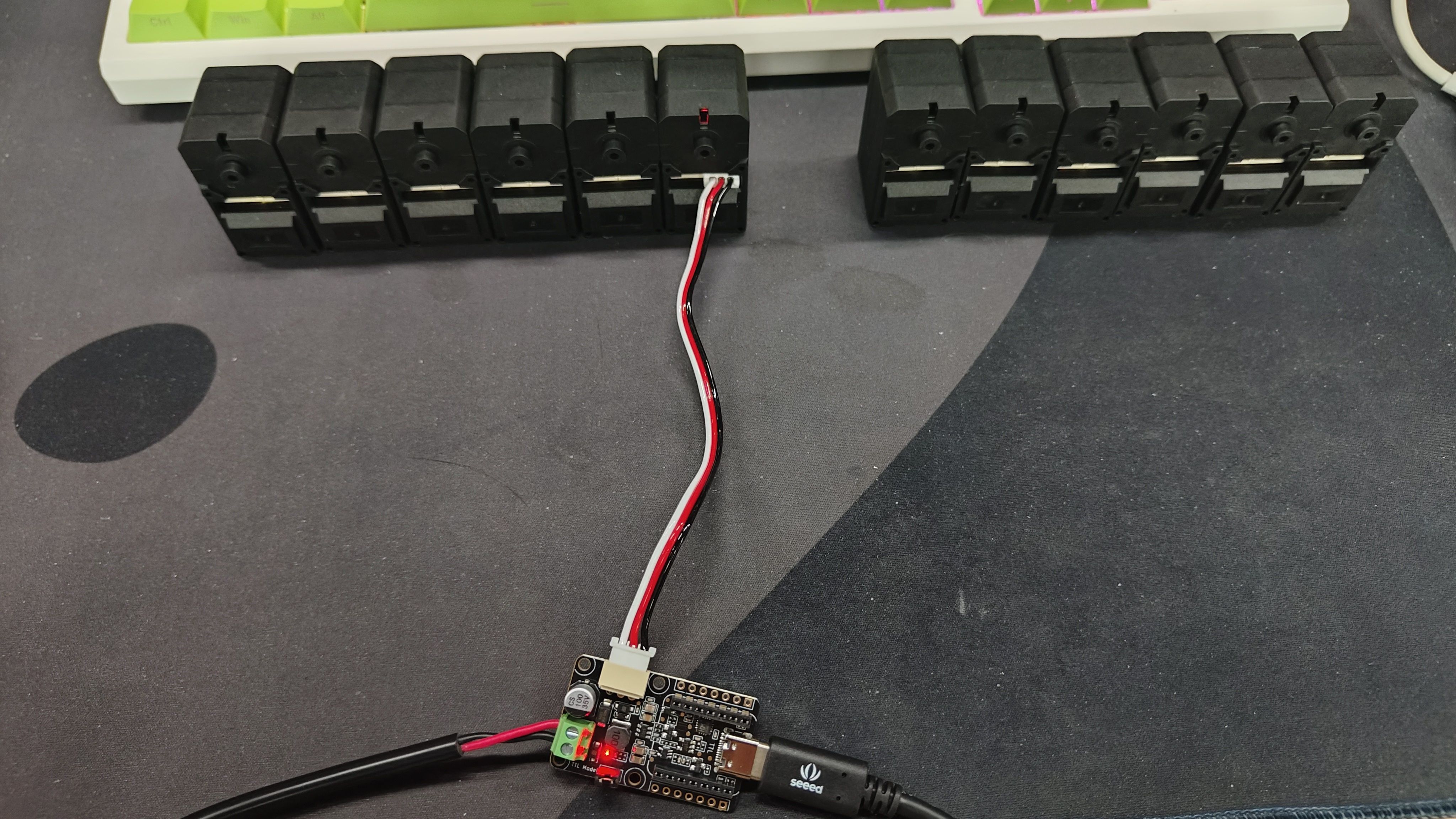 | 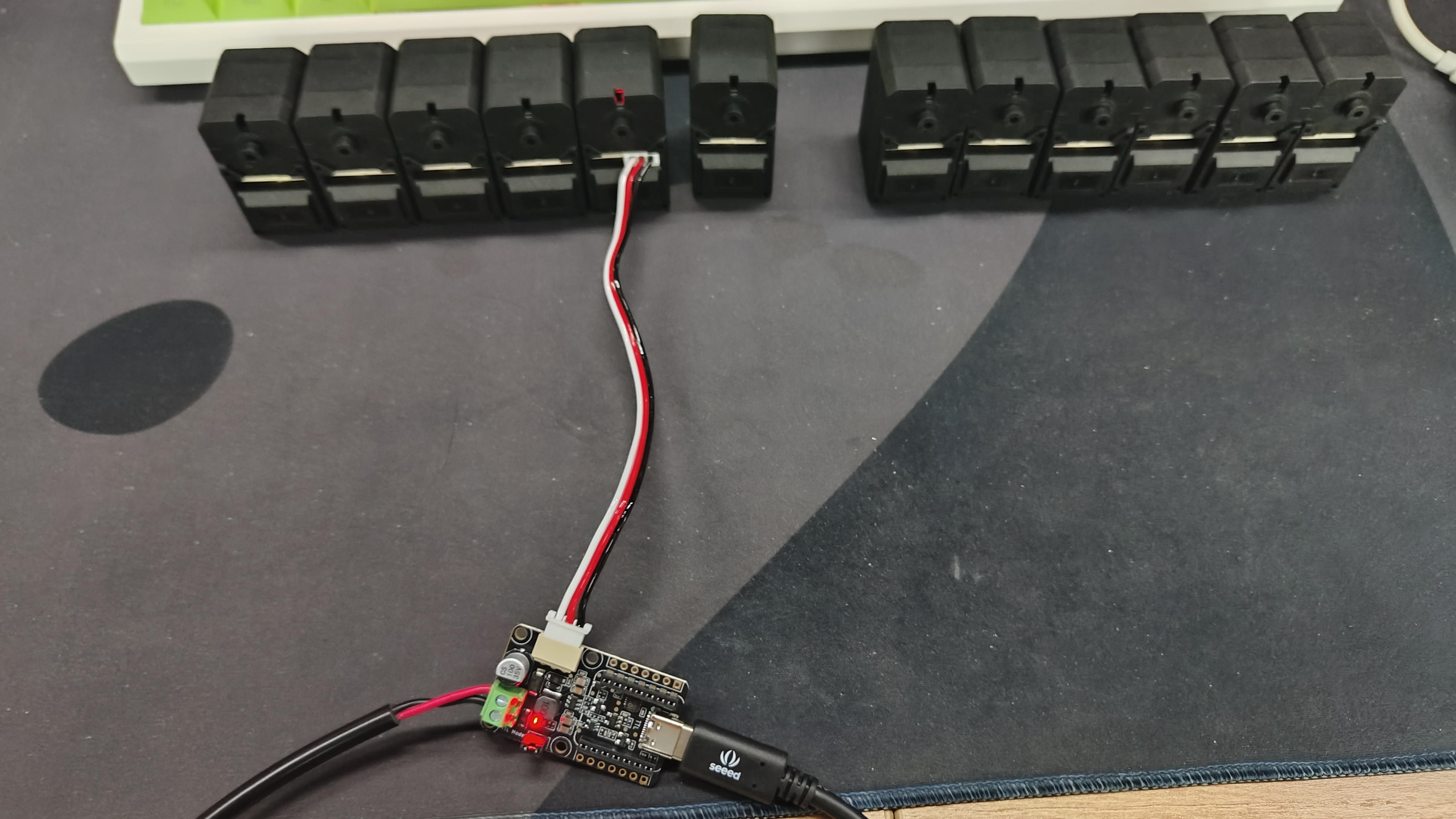 |  |
| Leader Arm Joint 3 | Leader Arm Joint 2 | Leader Arm Joint 1 |
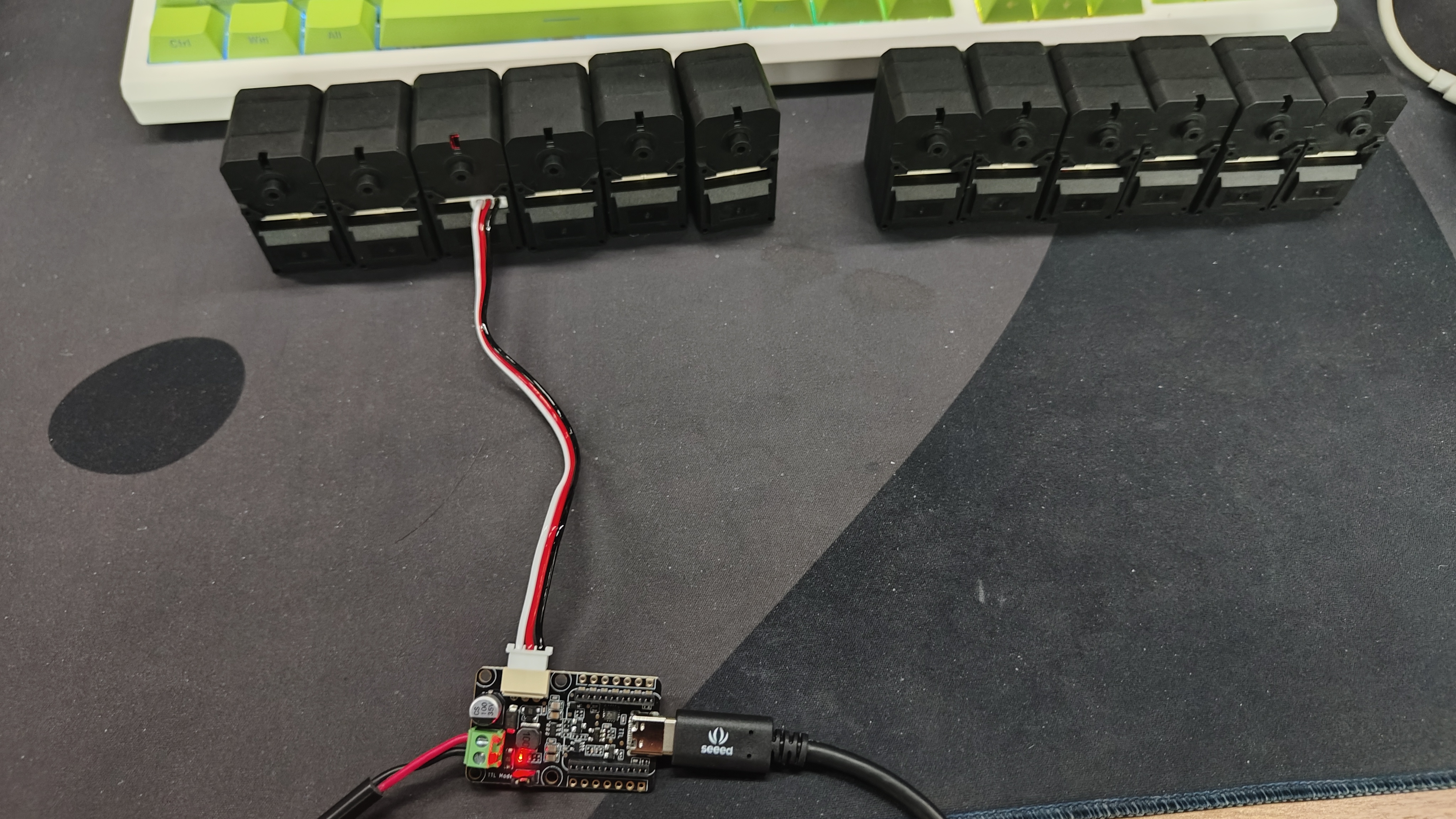 |  | 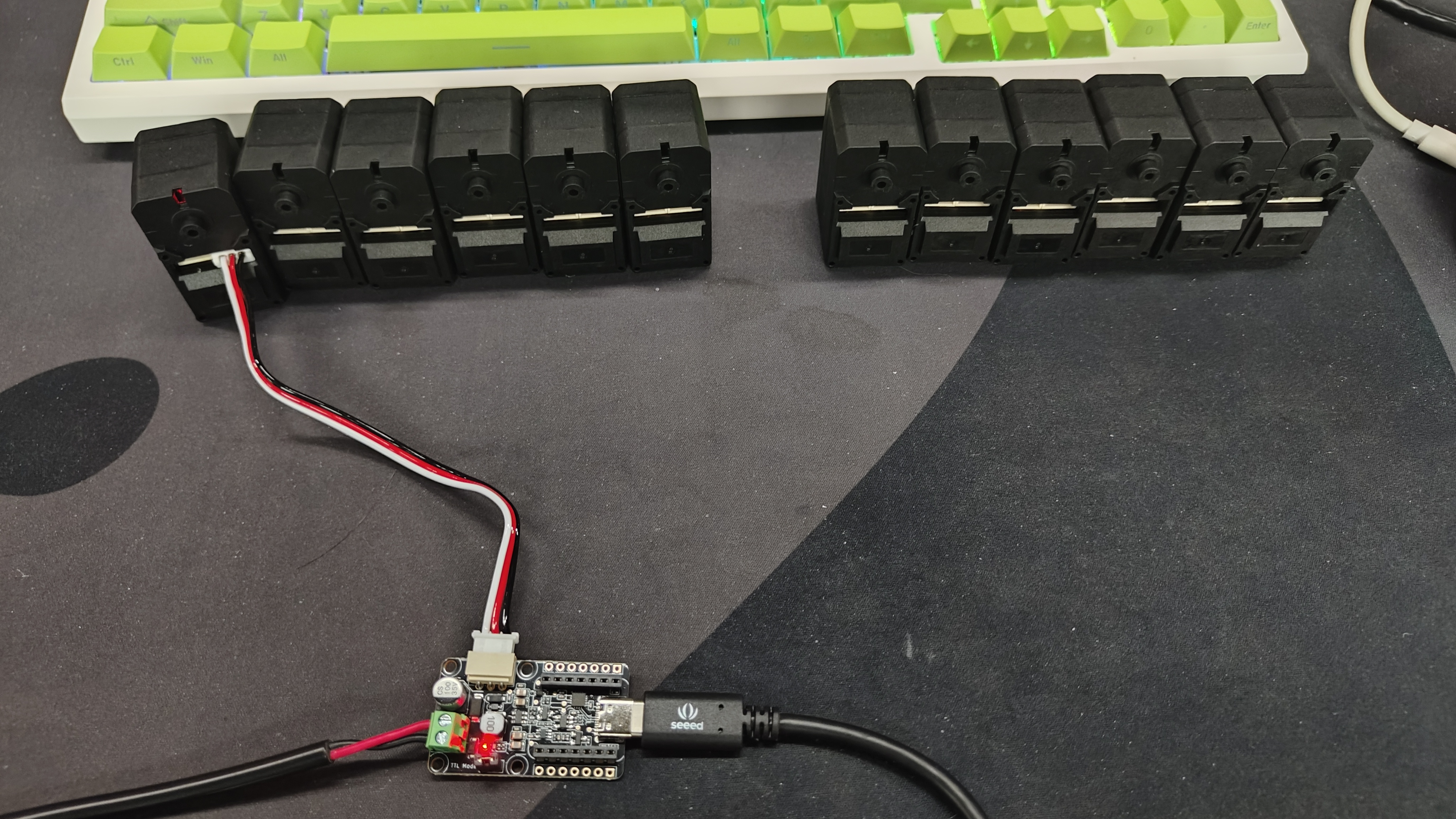 |
| Follower Arm Joint 6 | Follower Arm Joint 5 | Follower Arm Joint 4 |
|---|---|---|
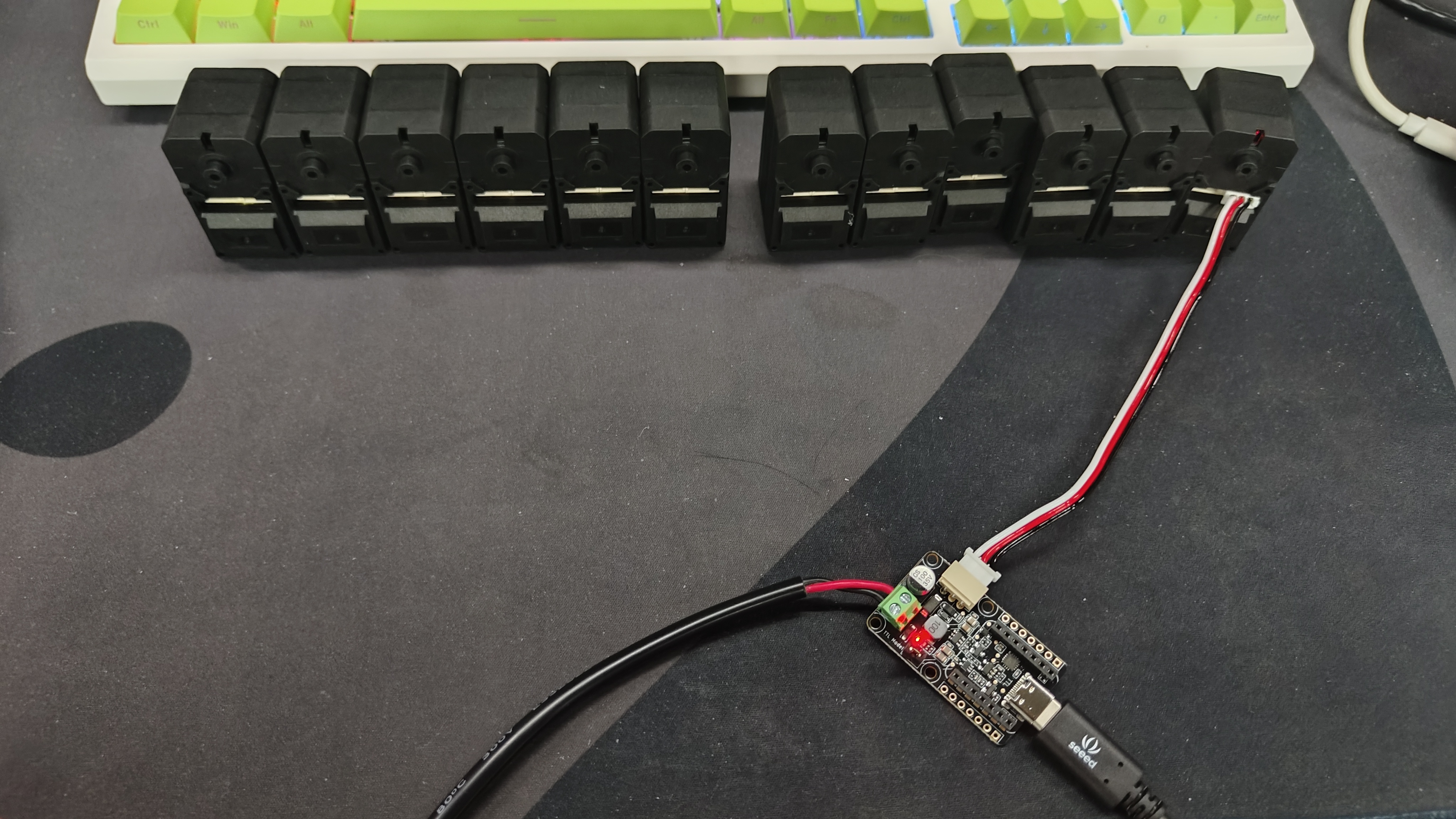 | 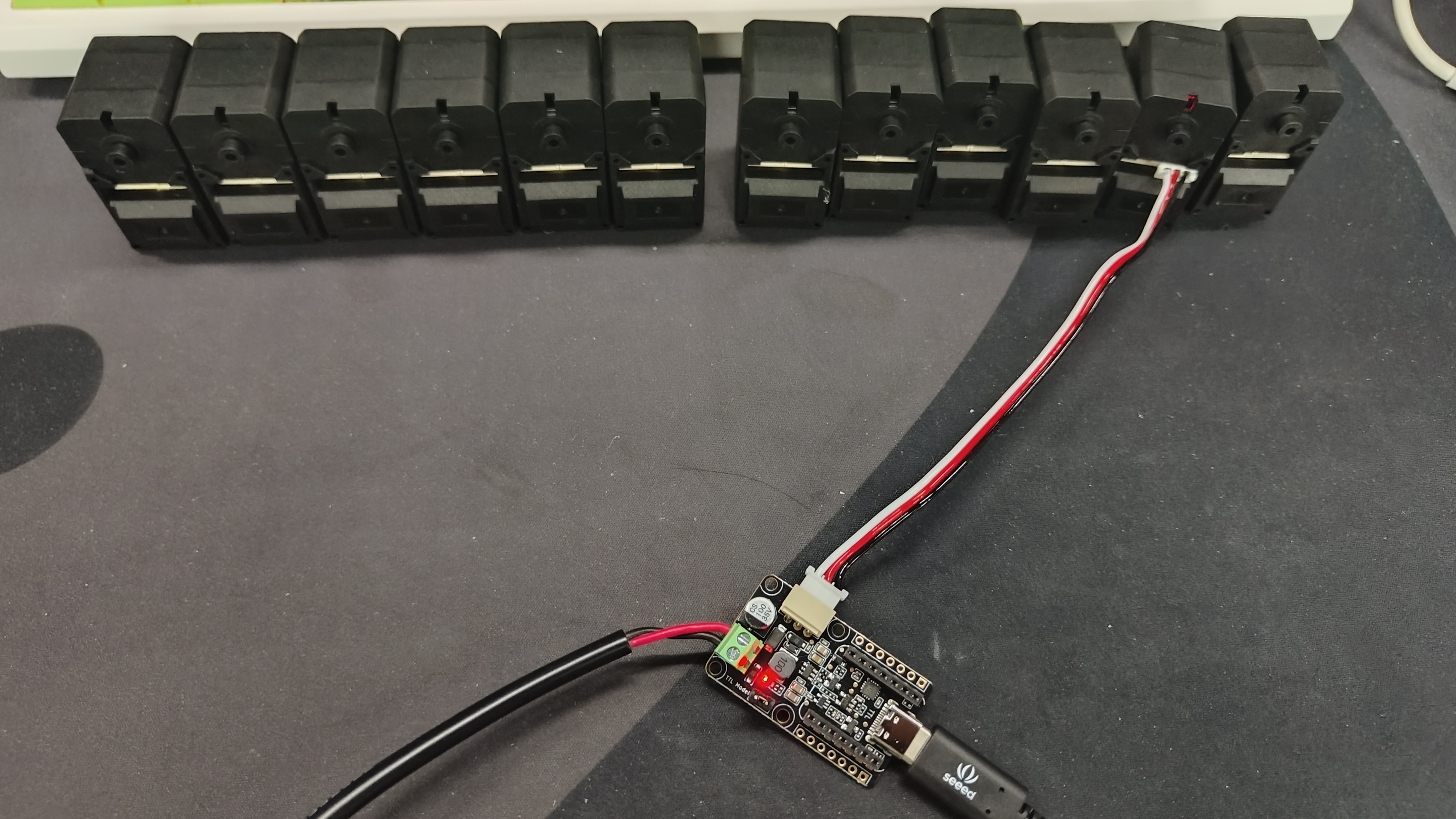 |  |
| Follower Arm Joint 3 | Follower Arm Joint 2 | Follower Arm Joint 1 |
 | 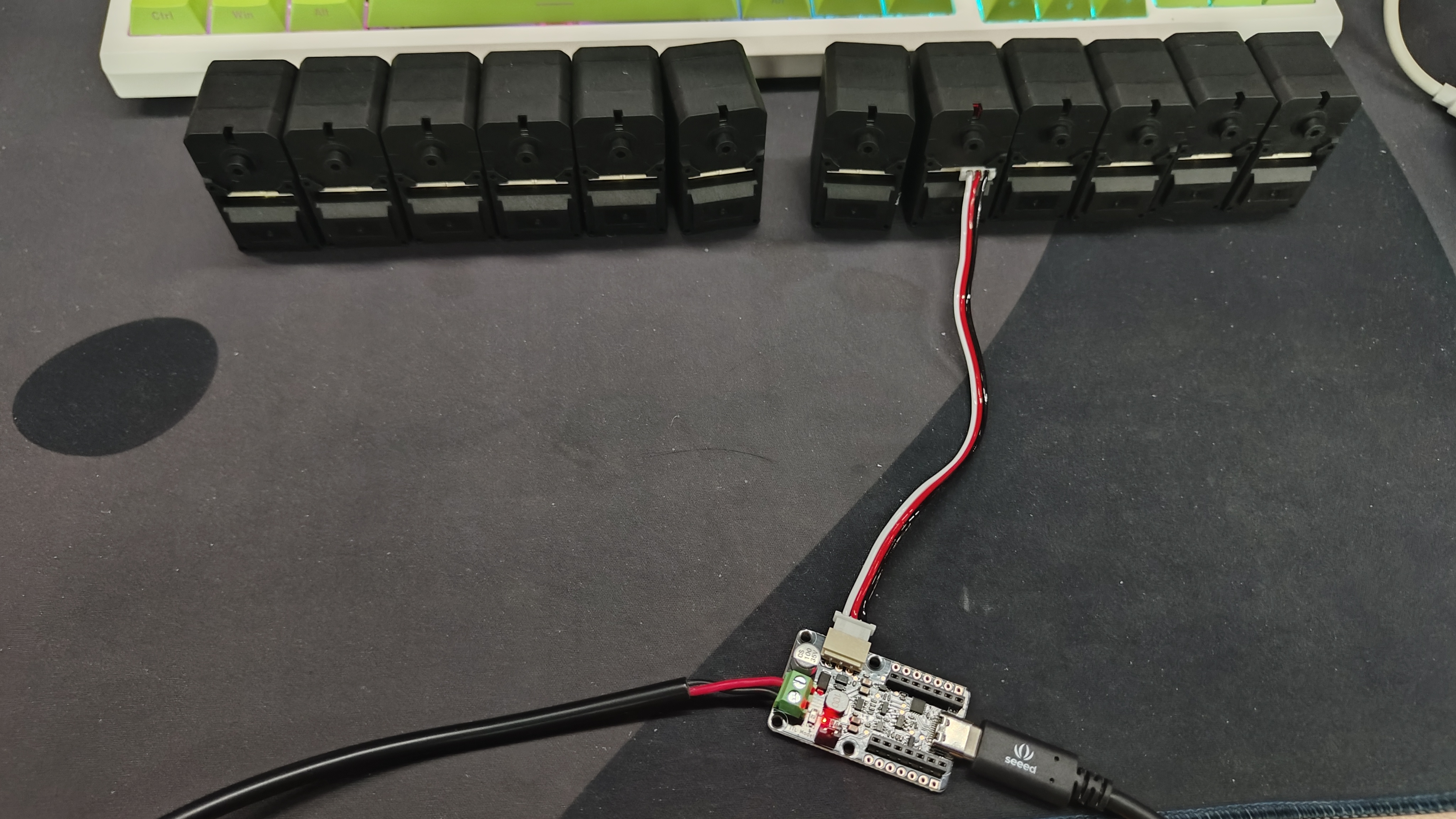 | 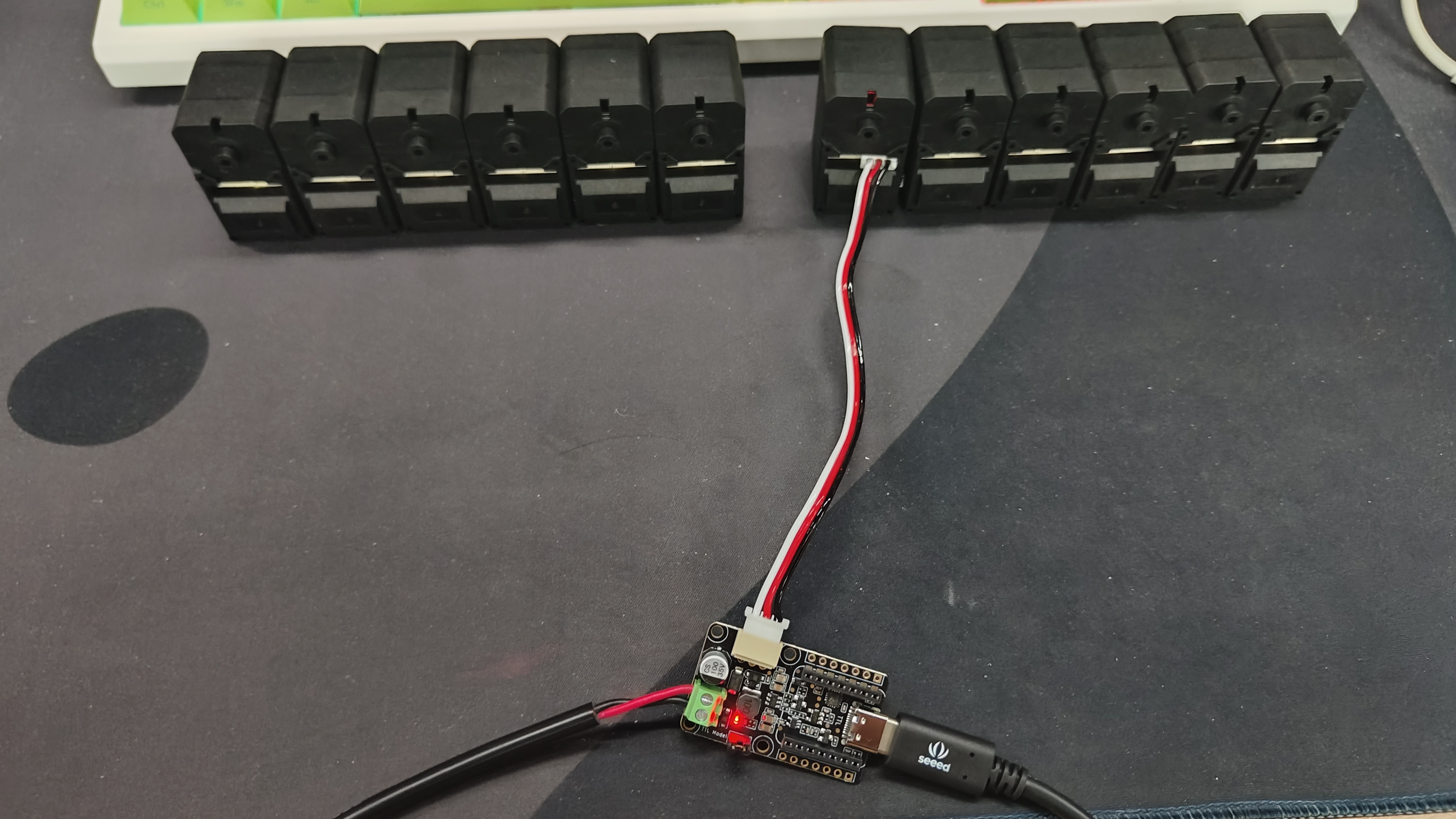 |
Leader 예시
lerobot-setup-motors \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0Follower 예시
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM1💡TIP : 각 모터를 하나씩 연결하여 ID와 Baudrate를 설정하세요. 케이블 연결 상태를 반드시 확인하세요.
4. 단계별 조립 가이드
아래는 각 관절(Joint)별 조립 방법과 참고 동영상입니다.
- 첫 번째 모터를 베이스에 넣고, M2x6mm 나사 4개(위 2개, 아래 2개)로 고정합니다.
- 모터 홀더를 끼우고, M2x6mm 나사 2개(양쪽 각 1개)로 고정합니다.
- 모터 혼 2개를 설치하고, 상단 혼은 M3x6mm 나사로 고정합니다.
- 숄더 부품을 부착하고, M3x6mm 나사 4개(위 4개, 아래 4개)로 고정합니다.
- 숄더 모터 홀더를 추가합니다.
- 두 번째 모터를 위에서 삽입합니다.
- M2x6mm 나사 4개로 고정합니다.
- 모터 혼 2개를 설치하고, M3x6mm 혼 나사로 고정합니다.
- 상완 부품을 M3x6mm 나사 4개씩 양쪽에 고정합니다.
- 세 번째 모터를 삽입하고, M2x6mm 나사 4개로 고정합니다.
- 모터 혼 2개를 설치하고, M3x6mm 혼 나사로 고정합니다.
- 전완 부품을 M3x6mm 나사 4개씩 양쪽에 고정합니다.
- 모터 홀더 4번을 끼웁니다.
- 네 번째 모터를 삽입합니다.
- M2x6mm 나사 4개로 고정하고, 모터 혼을 설치한 뒤 M3x6mm 혼 나사로 고정합니다.
- 다섯 번째 모터를 손목 홀더에 넣고, M2x6mm 전면 나사 2개로 고정합니다.
- 모터 혼 1개를 설치하고, M3x6mm 혼 나사로 고정합니다.
- 손목 부품을 M3x6mm 나사 4개씩 양쪽에 고정합니다.
- 그리퍼를 5번 모터에 부착하고, 손목의 모터 혼에 M3x6mm 나사 4개로 고정합니다.
- 그리퍼 모터를 삽입하고, M2x6mm 나사 2개씩 양쪽에 고정합니다.
- 모터 혼을 설치하고, M3x6mm 혼 나사로 고정합니다.
- 그리퍼 클로를 M3x6mm 나사 4개씩 양쪽에 고정합니다.
5. 조립 영상
조립 영상을 같이 보면서 진행해 보세요!
팔로워암 조립 영상
리더암 조립 영상
6. 참고 및 문제해결
조립 및 설정 중 문제가 발생하면, 전원/케이블 연결 상태를 반드시 점검하세요. Waveshare 보드를 사용할 경우 점퍼가 B 채널(USB)에 위치해야 합니다.